Günümüzde teknolojinin hızlı ilerlemesi, günlük yaşamı kolaylaştıran pek çok elektronik cihazın hayatımıza girmesini sağlamıştır. Bu cihazlar arasında öne çıkan PIR sensör (Pasif Kızılötesi Sensör), özellikle hareket algılama sistemlerinde yaygın olarak kullanılan önemli bir teknolojidir. PIR sensör teknolojisi; başta güvenlik sistemleri ve enerji tasarrufu çözümleri olmak üzere birçok alanda tercih edilmektedir. Bu sensörler, insan vücudunun yaydığı kızılötesi (IR) ısıyı algılayarak çalışır ve ortamdaki hareket değişimlerini hassas bir şekilde tespit edebilir. Bu yönüyle hem bireysel hem de endüstriyel kullanımda önemli bir yer edinmiştir.
Hareket sensörü teknolojisinin en yaygın temsilcilerinden biri olan PIR sensörler, enerji verimliliği açısından da dikkat çekici avantajlar sunar. Özellikle otomatik aydınlatma sistemlerinde kullanıldığında, gereksiz enerji tüketimini önleyerek elektrik tasarrufuna katkı sağlar. Aynı zamanda düşük bakım ihtiyacı ve uzun ömürlü yapısı sayesinde ekonomik ve sürdürülebilir bir çözüm sunar.
Güvenlik uygulamalarında da oldukça etkili olan PIR sensörler, izinsiz girişleri algılayarak alarm sistemlerini tetikleyebilir. Bu sayede hem konutlarda hem de iş yerlerinde güvenliği artıran önemli bir bileşen haline gelmiştir. Kolay montaj imkanı ve farklı ortamlara uyum sağlayabilen yapısı da bu sensörlerin tercih edilme sebeplerini güçlendirmektedir.
Pır Hareket Sensörü Nedir
PIR hareket sensörü, kızılötesi (infrared) ışınları kullanarak bulunduğu ortamdaki hareketleri algılayan elektronik bir bileşendir. “PIR sensörü nedir?” sorusunun en temel cevabı; pasif kızılötesi teknoloji sayesinde canlıların yaydığı ısı değişimlerini tespit eden bir algılama sistemi olmasıdır. PIR sensörler hakkında merak edilen birçok teknik detay, bu çalışma prensibine dayanır.
Bu sensörler, ortamda meydana gelen ani sıcaklık değişimlerini algılayarak çalışır. İnsan vücudunun yaklaşık 37°C sıcaklığa sahip olması, sensörün bu ısı farkını kolayca tespit etmesini sağlar. Sensör içerisinde yer alan pyroelectric (piroelektrik) malzeme, kızılötesi radyasyondaki değişimlere duyarlıdır ve bu değişimleri elektriksel sinyallere dönüştürerek sistemin çalışmasını sağlar.
PIR sensörlerin temel yapısında, birbirine ters bağlanmış iki algılama hücresi bulunur. Bu yapı sayesinde sensör, sabit ısı kaynaklarını göz ardı ederken yalnızca hareket eden ısı değişimlerini algılar. Ayrıca sensörün önünde bulunan Fresnel lens, algılama alanını genişleterek hassasiyeti artırır ve daha geniş bir açıdan hareket tespiti yapılmasına olanak tanır.
Genellikle PIR sensörlerin algılama mesafesi 3 ila 12 metre arasında değişir; bu değer kullanılan modele göre farklılık gösterebilir. Algılama açısı ise çoğunlukla 90° ile 110° arasındadır. Gelişmiş modellerde bu mesafe ve açı ayarlanabilir özellikte olabilir. Kompakt tasarımları ve düşük enerji tüketimleri sayesinde PIR sensörler, birçok elektronik projede ve sistemde ideal bir çözüm olarak öne çıkar.
Bu sensörler, çalışmaya başlamadan önce ortam sıcaklığına göre otomatik kalibrasyon yapar. Bu süreç genellikle 30–60 saniye sürer. Kalibrasyon tamamlandıktan sonra sensör aktif hale gelir ve hareket algılamaya başlar. Herhangi bir hareket tespit edildiğinde ise çıkış pininden dijital bir sinyal üreterek bağlı olduğu sistemi tetikler.
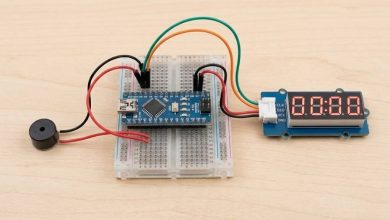
Arduino Pır Sensör
Arduino Pır Sensör uygulamaları, hobi elektronikçileri ve öğrenciler arasında oldukça popülerdir. Pır Sensör Arduino projeleri, basit hareket algılama sistemlerinden karmaşık güvenlik sistemlerine kadar geniş bir yelpazede kullanılabilir. Arduino Modülleri ve Arduino Sensör çeşitleri ile uyumlu çalışarak çeşitli projelerde kullanılabilir.
Bu sensör modülü, Arduino geliştirme kartlarıyla kolayca entegre edilebilen üç pinli bir yapıya sahiptir. VCC (güç), GND (toprak) ve Signal (sinyal) pinleri sayesinde basit bir bağlantı ile çalışmaya başlar. Dijital çıkış pini üzerinden hareket algılandığında “HIGH” (yüksek) sinyali, hareket olmadığında ise “LOW” (düşük) sinyali üretir.
Arduino platformunda PIR sensör kullanımı, hem kurulum hem de yazılım tarafında oldukça pratiktir. Sensörden veri okumak için temel olarak digitalRead ve digitalWrite komutları yeterlidir. PIR sensörlerin algılama mesafesi genellikle 3 ila 7 metre arasında değişirken, algılama açısı yaklaşık 120 dereceye kadar ulaşabilir.
Arduino ile kullanımda öne çıkan önemli detaylardan biri, sensör modülü üzerinde bulunan hassasiyet (sensitivity) ve gecikme (delay) ayar potansiyometreleridir. Bu ayarlar sayesinde sensörün algılama duyarlılığı ve tepki süresi, projenin ihtiyaçlarına göre kolayca optimize edilebilir. PIR sensör modülleri genellikle 5V ile çalışır ve düşük güç tüketimleri sayesinde özellikle pille çalışan projeler için oldukça uygun bir çözümdür.
Başlangıç seviyesindeki Arduino kullanıcıları için oldukça ideal olan PIR sensörler; LED kontrol devreleri, alarm sistemleri, otomatik aydınlatma uygulamaları ve hareket algılama/kayıt projeleri gibi birçok farklı alanda kullanılabilir. Ayrıca farklı sensör ve modüllerle entegre edilerek daha gelişmiş sistemler oluşturulabilir. Örneğin; bir PIR sensör, sıcaklık sensörü ve LCD ekran ile birlikte kullanılarak kapsamlı bir ortam izleme sistemi tasarlanabilir.
Hareket Sensörü Çeşitleri – Pır Sensör Çeşitleri
Günümüz teknolojisinde farklı ihtiyaçlara yönelik çeşitli hareket sensörü tipleri bulunmaktadır. Bu sensörler voltaj değerlerine, algılama mesafelerine, koruma sınıflarına ve montaj tiplerine göre sınıflandırılır. Temel olarak iç mekan ve dış mekan kullanımına uygun sensörler olmak üzere ikiye ayrılır. Ayrıca tavan tipi, duvar tipi ve gömme tip gibi montaj seçenekleri mevcuttur. Algılama açısı ve mesafesi de sensör seçiminde önemli kriterler arasındadır. Bazı modeller 360 derece algılama yapabilirken, diğerleri belirli bir açı aralığında çalışmaktadır. IP koruma sınıfına göre su ve toza karşı dayanıklı modeller de bulunmaktadır.
12V Hareket Sensörü
12V PIR sensör sistemleri, düşük voltaj gerektiren uygulamalar için oldukça pratik ve verimli çözümler sunar. Bu sensörler; özellikle araç içi güvenlik sistemlerinde, taşınabilir projelerde ve güneş enerjisiyle çalışan sistemlerde yaygın olarak tercih edilir. Akü ve batarya ile uyumlu şekilde çalışabilmeleri sayesinde kesintisiz güç kaynaklarıyla birlikte sorunsuz bir kullanım sağlarlar.
DC güç ile çalışan bu sensörler; alarm sistemleri, otomatik kapı mekanizmaları ve güvenlik kameraları gibi düşük voltajlı uygulamalarda sıkça kullanılır. Küçük boyutları ve düşük enerji tüketimleri sayesinde portatif projeler için de oldukça uygun ve avantajlı bir çözüm sunarlar.
220V Hareket Sensörü
220V PIR sensör modelleri, konut ve ticari alanlarda kullanılan aydınlatma sistemlerinde oldukça yaygın bir kullanım alanına sahiptir. Doğrudan şebeke elektriği ile çalışabilmeleri sayesinde ekstra bir adaptör ya da güç kaynağına ihtiyaç duymazlar. Bu özellikleriyle; merdiven boşlukları, garajlar, depolar ve bahçe aydınlatmaları gibi alanlarda sıkça tercih edilirler.
Bu sensörlerin algılama mesafesi genellikle 3 ila 12 metre arasında ayarlanabilir ve yaklaşık 180 dereceye kadar geniş bir algılama açısı sunar. Zaman ayarı fonksiyonu sayesinde, hareket algılandıktan sonra aydınlatmanın ne kadar süre aktif kalacağı kullanıcı tarafından kolayca belirlenebilir. Kolay montaj imkânı ve yüksek güvenlik standartlarına uygun yapıları sayesinde profesyonel elektrikçiler tarafından güvenle kullanılmaktadır.
Pır Sensörü – Hareket Sensörü Kullanım Alanları
Otomatik Lamba Sensörü sistemleri, enerji tasarrufu sağlamak için en yaygın kullanım alanlarından biridir. Lamba Sensörü uygulamaları, özellikle ortak kullanım alanlarında tercih edilmektedir. Bu sensörler, apartman girişleri, merdiven boşlukları, koridorlar ve otoparklar gibi alanlarda sıklıkla kullanılmaktadır.
PIR sensörler, ev güvenlik sistemlerinin önemli bir parçası olarak görev yapar ve herhangi bir hareket algıladıklarında alarm mekanizmasını devreye alarak kullanıcıyı bilgilendirebilir. Bunun yanı sıra; bahçe aydınlatmaları, garaj kapısı otomasyonları ve dış mekân güvenlik kameraları gibi uygulamalarda da yaygın şekilde kullanılmaktadır.
Ticari alanlarda ise mağazalar ve ofislerde müşteri sayımı ve enerji yönetimi amacıyla tercih edilir. Depo ve endüstriyel tesislerde güvenlik sistemleri ile otomatik kapı çözümlerinde kullanılarak operasyonel verimliliğin artırılmasına katkı sağlar. Ayrıca otel odaları ve konferans salonları gibi geçici kullanım alanlarında enerji tasarrufu elde etmek için de etkili bir çözüm sunar.
Akıllı ev sistemlerinde diğer otomasyon bileşenleriyle entegre çalışabilen PIR sensörler, konfor ve güvenliği bir arada sunar. Örneğin; klima ve havalandırma sistemleriyle birlikte çalışarak ortamda insan varlığına göre iklimlendirme ayarlarını otomatik olarak optimize edebilir. Bununla birlikte, engelli ve yaşlı bakım merkezlerinde düşme algılama ve acil durum uyarı sistemleri gibi özel uygulamalarda da kullanılmaktadır.
Pır Sensör Nasıl Çalışır
Pır Sensör Devre Şeması incelendiğinde, sensörün çalışma prensibi daha iyi anlaşılabilir. Pır Sensörü Datasheet bilgilerinde detaylı teknik özellikler yer alır. Pır Sensörü Nasıl Bağlanır konusu, kullanım kılavuzlarında detaylı olarak açıklanmaktadır.
PIR sensörler, pyroelectric sensör elementi sayesinde kızılötesi ışınlardaki değişimleri algılayarak çalışır. Sensör içerisinde bulunan bu özel element, ortamdaki canlıların yaydığı ısı kaynaklı kızılötesi radyasyondaki değişimlere karşı hassastır. Sensörün önünde bulunan fresnel lens, algılama alanını genişletir ve hassasiyeti artırır.
Sensör, algılama alanına giren bir cismin yaydığı kızılötesi ışınları tespit ettiğinde, dahili karşılaştırıcı devresi sayesinde çıkış sinyali üretir. Bu sinyal, sensörün ayarlanabilir hassasiyet ve gecikme süreleri parametrelerine göre işlenir. Sensörün üzerinde bulunan trimpotlar sayesinde bu değerler kullanıcı tarafından ihtiyaca göre ayarlanabilir.

Çalışma prensibi açısından PIR sensörler iki temel mod sunar: tekli tetikleme (monostable) ve sürekli tetikleme (bistable). Tekli tetikleme modunda sensör, hareketi algıladıktan sonra belirlenen süre boyunca çıkış verir ve sonra kapanır. Sürekli tetikleme modunda ise hareket devam ettiği sürece çıkış sinyali üretmeye devam eder.
Sensörün sağlıklı çalışması için doğru montaj pozisyonu ve uygun çevre koşulları önemlidir. Genellikle yerden 2-3 metre yüksekliğe monte edilir ve algılama alanı içerisinde hava akımı, doğrudan güneş ışığı gibi parazit oluşturabilecek faktörlerden uzak tutulması gerekir.
Hareket Sensörü Fiyat – Pır Sensörü Fiyatları
Pır Sensörü Fiyatları model ve özelliklerine göre değişiklik göstermektedir. Tavan Sensörü Fiyatları ve 12 Volt Hareket Sensörü Fiyatları piyasa koşullarına göre farklılık gösterebilir. Piyasada bulunan sensör çeşitlerinin fiyatları, algılama mesafesi, hassasiyet ayarı, su geçirmezlik özelliği ve montaj tipine göre değişkenlik göstermektedir.
Temel seviyedeki PIR sensörler, genellikle daha ekonomik fiyatlara sahip olup basit ev otomasyonu projeleri için uygun çözümler sunar. Buna karşılık, profesyonel kullanım amacıyla geliştirilen ve daha fazla özellik barındıran modeller, daha yüksek fiyat aralığında yer almaktadır. Özellikle dış mekân kullanımına uygun, zorlu hava koşullarına dayanıklı sensörler; standart iç mekân ürünlerine kıyasla daha maliyetli olabilmektedir.
Fiyatlandırmada üretici marka, garanti süresi ve ürünün menşei de belirleyici unsurlar arasında yer alır. Yerli üreticilerin sunduğu uygun fiyatlı alternatiflerin yanı sıra, global markaların daha yüksek kalite standartlarına sahip ürünleri de tercih edilebilmektedir. Bununla birlikte, toplu alımlarda sensör birim fiyatlarında ciddi avantajlar elde etmek mümkündür.
- Kolay kurulum
- Düşük enerji tüketimi
- Uzun ömürlü kullanım
- Farklı voltaj seçenekleri
- Çeşitli algılama mesafeleri
- Kalite standartlarına uygunluk
- Garanti kapsamı
- Yedek parça bulunabilirliği
- Teknik destek hizmetleri
- Montaj kolaylığı
Faydalı Linkler
- Mesafe ve Hareket Sensörleri Ürünlerimizi İnceleyebilirsiniz.
- Temel Elektronik kategorimizi inceleyiniz.